Technique : Le différentiel
le 03/08/2005
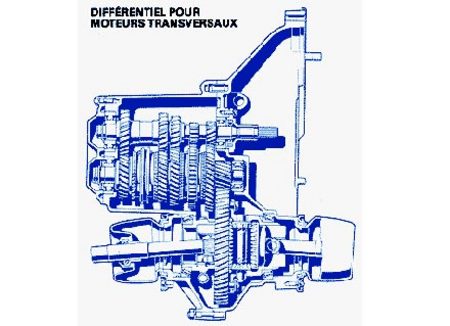
Sur un véhicule les roues motrices sont reliées par des demi-arbres commandés par un renvoi d'angle (couple conique, ou cylindrique dans le cas d'un moteur transversal).
Sur chacune des roues il s'exerce un couple égal à la moitié de celui fourni par le renvoi d'angle. A cause de la liaison rigide constituée avec l'arbre de transmission, les deux roues motrices tournent à la même vitesse angulaire, ce qui ne présente pas d'inconvénients particuliers dans la marche en ligne droite.
En virage, par contre, le parcours de la roue intérieure est réduit par rapport à celui de la roue extérieure ; ces deux distances devant être effectuées dans le même intervalle de temps il faut que la vitesse angulaire des deux roues soit différente.
Dans le cas considéré. une des roues glisse sur le sol (ce qui est un grave inconvénient pour la durée des pneumatiques et pour la tenue de route ; à la limite, on en arrive au tête-à-queue); par ailleurs, les demi-arbres subissent un effort de torsion qui peut, tôt ou tard. entraîner leur rupture. Un différentiel, permettant aux deux roues de tourner éventuellement à des vitesses angulaires différentes, élimine ces inconvénients.
En virage, la roue extérieure suit une trajectoire ayant un rayon plus grand que celle de la roue intérieure. Si les roues ne sont pas motrices, aucun problème. Sinon, il est nécessaire d'interposer un mécanisme différentiel permettant aux roues de tourner à des vitesses différentes. D.R.
Marche en ligne droite D.R.
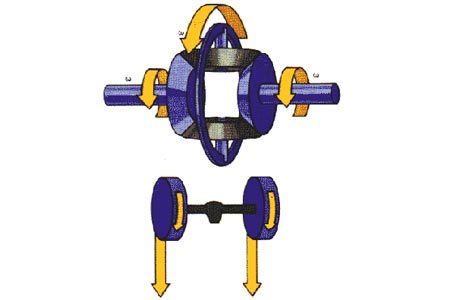
Marche en ligne droite
Les trajectoires parcourues par les roues sont identiques, donc les vitesses de rotation sont égales. Les satellites ne tournent pas sur eux-mêmes; le porte satellites tourne sous l'effet du couple en transmettant le mouvement aux planétaires qui reçoivent un couple équivalent égal à la moitié du couple principal.
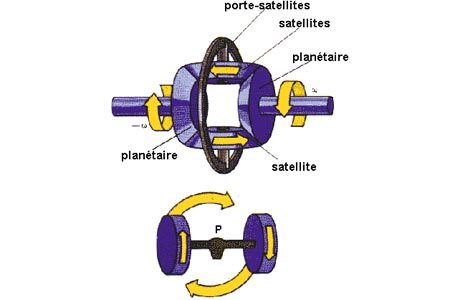
Rotation autour du point P
Si l'on soulève les roues motrices et que l'on fait tourner une roue dans un sens, l'autre tournera dans le sens opposé en conséquence de l'inversion du mouvement provoquée par les satellites. Ceci correspondrait à une rotation du train autour d'un point P situé en son milieu.
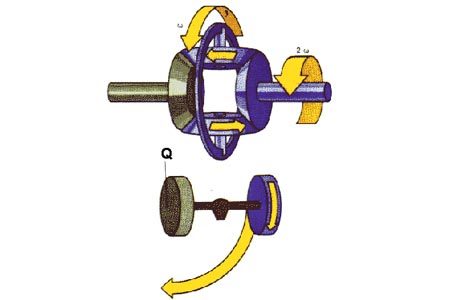
Rotation autour du point Q
Si l'on bloque une roue, le porte-satellites et les satellites tournent en transmettant tout le couple du moteur à l'autre demi-essieu qui tourne ainsi à une vitesse double. La roue concernée tournera à une vitesse deux fois supérieure à ce qu'elle serait en ligne droite.
Rotation autour du point P D.R.
Rotation autour du point Q D.R.
On reconnait la couronne boulonnée à la cloche porte-satellites dont l'axe des satellites est solidaire, les satellites tournant fou autour de leur axe, les planétaires qui engrènent avec les satellites et sont solidaires des demi-arbres.
Le différentiel fut inventé en 1827 par le mécanicien français Onésiphore Pecqueur (Pas-de- Calais 1792 Paris 1852), chef d'atelier au Conservatoire national des arts et métiers à Paris.
On raconte qu'il a conçu l'idée de cet appareil alors qu'il travaillait sur un modèle du chariot de Cugnot (ce qui semble assez étonnant. vu la disposition des roues et de la transmission sur ce véhicule).
Le différentiel devint d'un usage assez courant sur les premiers véhicules à vapeur dans la seconde moitié du XIXe siècle : un des premiers exemples fut celui de Clayton and Shuttleworth, de1865. Au cours des années, la technique de construction de cet appareil, comme, du reste, celle de tous les éléments de l'automobile, s'est perfectionnée peu à peu en tirant de grands avantages des progrès parallèles effectués par la métallurgie et la technologie.
CONSTRUCTION
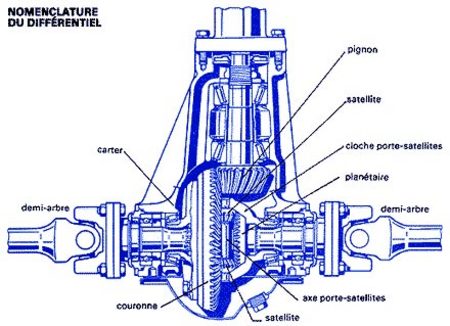
Sous sa forme la plus courante, le différentiel se compose :
- de deux pignons coniques, appelés planétaires, reliés aux extrémités des demi-arbres, généralement par des cannelures ;
- de deux autres pignons coniques, appelés satellites, montés sur un porte-satellites et engrenant avec les planétaires ;
- d'une cage supportant le porte-satellites et solidaire de la couronne du couple conique.
Double différentiel 1921 D.R.
D.R.
L'axe des satellites n'étant pas fixe, le différentiel est un train épicydoïdal sphérique (les axes de tous les pignons sont concourants). Quand les couples à transmettre sont élevés (comme, par exemple, sur les camions), le différentiel peut posséder quatre satellites sur un croisillon.
Les planétaires et les satellites comportent des dentures droites, étant donné leur vitesse de travail modérée et le faible pourcentage de temps pendant lequel ces roues sont soumises à un mouvement relatif (virages).
Les satellites, les planétaires et l'axe porte-satellites sont généralement en acier au carbone ou légèrement cémentés (par exemple le 16 NiCr4 ; charge de rupture 110 kg/mm2 ; limite élastique 85 kg/mm2). La cage est généralement moulée en fonte au graphite sphéroïdal ( charge de rupture 55 kg/mm2 ) limite élastique 40 kg/mm2 ; HB = 220 kg/mm2.
Ses extrémités comportent deux axes creux (pour laisser passer les demi-arbres) montés sur roulements à bille dans le carter de protection. Sur cette cage est boulonnée la grande couronne qui, avec le pignon d'attaque, constitue le couple conique.
PRINCIPE DE FONCTIONNEMENT
Le couple C du moteur fait tourner le porte-satellites autour de l'axe des planétaires, lesquels, soumis chacun à un couple C/2, transmettent le mouvement aux roues, Dans ce cas, qui correspond à une trajectoire rectiligne, les satellites ne tournent pas autour de leur axe mais ont seulement pour fonction de constituer une liaison rigide entre les planétaires.
Si maintenant, même avec la boîte de vitesses au point mort, après avoir soulevé les roues motrices on en fait tourner une, on remarque que l'autre tourne en sens inverse : l'action compensatrice du différentiel augmente la vitesse d'une roue en réduisant celle de l'autre.
En superposant le cas de la traction en ligne droite à celui des deux roues qui tournent en sens inverse, on obtient tous les cas intermédiaires, Le fonctionnement du satellite peut être assimilé, par analogie mécanique, à celui d'une poulie.
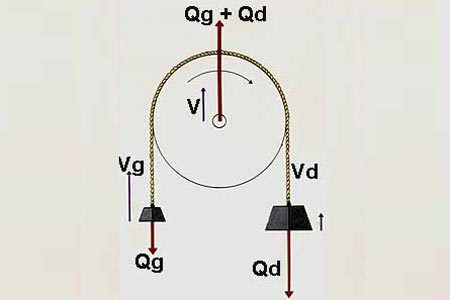
Le principe de fonctionnement des satellites peut se comprendre si l'on se réfère à une poulie sur laquelle passe une corde comportant à ses extrémités des poids différents ( ici Qd > Qg)
On peut considérer ces poids comme les forces exercées par les planétaires sur les satellites. Si, comme dans le cas ci contre, la différence entre les poids dépasse la résistance au frottement de la poulie (Qd - Qg > R) celle ci se met à tourner.
De même, dans un différentiel, les satellites tourneront lorsque les couples appliqués aux roues (planétaires) seront différents.
Tant que la différence restera inférieure à la résistance interne du différentiel, les satellites resteront immobiles, le différentiel n'interviendra pas.
Les forces Qg et Qd exercées par les planétaires sur le satellite peuvent être interprétées comme des poids appliqués aux extrémités d'une corde passant sur une poulie . Si R est la résistance de frottement qui s'oppose au mouvement de la poulie et que Qd > Qg la poulie ne tournera que si Qd - Qg > R.
La poulie demeure immobile tant que la différence des forces appliquées aux extrémités de la corde ne dépasse pas la résistance de frottement. De la même manière, le satellite ne tournera pas, et par conséquent les vitesses angulaires des deux roues motrices seront égales, si la différence entre les forces motrices est plus petite que la force de frottement interne du différentiel.
D.R.
D.R.
Quand la différence entre les forces appliquées dépasse la résistance de frottement, on constate que la poulie tourne alors de telle sorte que le poids le plus lourd s'abaisse et le plus léger s'élève avec une vitesse V. Si la poulie tourne avec une vitesse v inférieure à V, il en résulte que les vitesses absolues des extrémités de la corde sont respectivement :
- Vg plus grande que celle de la poulie dans le cas de l'extrémité qui monte (poids appliqué plus faible) ;
- Vd plus petite que celle de la poulie dans le cas de l'extrémité qui descend (poids appliqué plus fort).
D'après la mécanique de la poulie, la moyenne arithmétique des vitesses des extrémités de la corde doit être égale à la vitesse de translation de l'axe.
D'après la mécanique de la poulie, la moyenne arithmétique des vitesses des extrémités de la corde doit être égale à la vitesse de translation de l'axe : V = (Vg + Vd) / 2
On peut déduire de cette comparaison que la moyenne des vitesses de rotation des roues sera égale à celle de la couronne. Après avoir considéré les vitesses, il est intéressant de comparer les couples moteurs exercés sur les roues commandées par le différentiel.
Pour un différentiel à frottement interne nul, les couples moteurs sont égaux l'un à l'autre. Si, au contraire, le frottement interne est constant, les couples différent au maximum de la valeur de frottement. Le différentiel répartit le couple moteur entre les deux roues dans des proportions qui ne sont pas rigoureusement égales à cause du frottement interne.
En effet, en virage, la roue extérieure à la courbe, qui est celle qui provoque la rotation du différentiel, reçoit un couple inférieur à celui exercé sur la roue intérieure. La différence entre les deux couples correspond au couple de frottement interne du différentiel.
C'est là que réside le point faible du différentiel. Si, en effet, une roue dépasse la limite d'adhérence, elle glisse et le couple qu'elle absorbe est seulement le couple (négligeable) nécessaire pour la faire tourner à vide. Le couple que reçoit l'autre roue est également faible (il ne diffère du précédent que par le frottement interne du différentiel), si bien que le véhicule demeure immobile, le couple moteur résultant étant de très loin inférieur à celui qui serait nécessaire pour vaincre les résistances à l'avancement.
Pour une traction avant, en virage, la force de traction étant plus importante sur la roue intérieure, le frottement interne du différentiel provoque un réalignement automatique en ligne droite pour un déport positif et une accentuation du braquage avec un déport négatif.
Pour éviter des réactions excessives sur le volant, on prévoit alors des déports très faibles et l'on s'efforce d'appliquer aux roues motrices des couples pratiquement égaux. Cette condition peut être réalisée avec des différentiels à rendement interne élevé. Pour cette raison, il n'est pas indiqué, sauf cas particuliers (véhicules industriels, engins de travaux publics), d'utiliser un différentiel autobloquant.
APPLICATIONS SUR LE VEHICULE AUTOMOBILE
Pour transmettre le mouvement aux n roues motrices d'un véhicule automobile sans glissement aux points de contact des pneumatiques avec le sol, il faut n - 1 différentiels.
De cette façon, la loi du mouvement d'une roue motrice étant donnée, celle de toutes les autres demeure fixée.
Pour un véhicule à deux roues motrices, il faudra un seul différentiel normal et pour une traction intégrale (4 roues motrices) il faudra trois différentiels : deux différentiels pour chacun des essieux divisant le couple entre les deux roues de leur essieu, et un différentiel intermédiaire répartissant le couple entre les essieux avant et arrière.
Différentiel asymétrique. Les planétaires sont de diamètres différents pour permettre une répartition inégale deds couples. ce système est employé sur les véhicules ayant une répartition des charges très différente d'un essieu à l'autre, afin de permettre une transmission du mouvement aux différentiels avant et arrière compatible avec l'adhérence disponible
La présence de ce dernier différentiel est particulièrement utile lorsque les poids adhérents sont très différents à l'avant et à l'arrière : pour utiliser toute adhérence, les couples devront être répartis proportionnellement aux poids adhérents.
Ainsi, par exemple, si le train avant supporte un poids de 2 000 kg et le train arrière un poids de 4 000 kg, il faudra, pour l'adhérence, que le couple moteur du train arrière soit le double de celui du train avant.

Différentiel asymétrique. D.R.
Différentiel à engrenage cylindrique Alfa-Romeo 2500 1939. D.R.
Pour satisfaire à cette condition, on devra monter un différentiel asymétrique, c'est-à-dire capable de répartir le couple moteur dans des proportions différentes entre les essieux avant et arrière ; ceci s'obtient en adoptant des planétaires de diamètres différents les couples à la sortie sont seront proportionnels aux diamètres des planétaires respectifs). Il faut toutefois remarquer que le différentiel intermédiaire doit pouvoir être bloqué, sinon l'avantage de la traction sur les quatre roues serait illusoire. Il suffit que l'une des deux roues d'un essieu dépasse la limite d'adhérence pour que celui-ci ne reçoive plus le couple moteur, ce qui, à cause de la présence du différentiel intermédiaire, prive également l'autre essieu du couple, avec pour conséquence l'immobilisation du véhicule.
Quand deux roues motrices d'un véhicule suivent une trajectoire identique avec le même rayon de courbure, ce qui revient à dire qu'elles ont la même vitesse angulaire, un différentiel entre ces roues n'est pas nécessaire. Le nombre des différentiels peut être inférieur à la valeur théorique. La majeure partie des véhicules à quatre roues motrices ne possèdent pas de différentiel intermédiaire entre les essieux avant et arrière.
De cette manière, les essieux avant et arrière sont obligés de faire le même nombre de tours pour recevoir les mêmes couples moteurs. Les exemples de véhicules sans différentiel ne manquent pas. Signalons de nombreux cyclecars à quatre roues, le prototype de la Lancia Lambda de 1921 et l'Isetta de 1953 (sa voie arrière réduite rendait inutile l'emploi d'un différentiel).
On a étudié et même utilisé des différentiels différents du modèle à engrenages coniques. Citons, par exemple, le différentiel à engrenages cylindriques utilisé sur l'Alfa Romeo 2500 (1939) ou, encore, le différentiel à vis sans fin.